 資訊熱線:
資訊熱線:紅外線反射式傳感器在小車導航中的應用

廣州市超毅電子今天又為廣大朋友帶來技術上的福利了,今天的福利是告訴你如何利用紅外反射式傳感器實現小車自動尋跡導航的設計,用以實現小車自動識別路線,判斷并自動規避障礙,以及選擇正確的路線。實驗中采用與地面顏色有較大差別的線條作引導,使用反射式紅外傳感器感知導引線和判斷障礙物。系統控制核心采用AT89C2051的單片機,系統驅動采用控制方式為單向PWM的直流電機。該技術可以應用于無人駕駛機動車,無人工廠、倉庫、服務機器人等領域。
自第一臺工業機器人誕生以來,機器人的發展已經遍及機械、電子、冶金、交通、宇航、國防等領域。近年來機器人的智能水平不斷提高,并且迅速地改變著人們的生活方式。人們在不斷探討、改造、認識自然的過程中,制造能替代人勞動的機器一直是人類的夢想。
隨著科學技術的發展,機器人的感覺傳感器種類越來越多,其中視覺傳感器成為自動行走和駕駛的重要部件。視覺的典型應用領域為自主式智能導航系統,對于視覺的各種技術而言圖像處理技術已相當發達,而基于圖像的理解技術還很落后,機器視覺需要通過大量的運算也只能識別一些結構化環境簡單的目標。視覺傳感器的核心器件是攝像管或CCD,目前的CCD已能做到自動聚焦。但CCD傳感器的價格、體積和使用方式上并不占優勢,因此在不要求清晰圖像只需要粗略感覺的系統中考慮使用接近覺傳感器是一種實用有效的方法。
機器人要實現自動導引功能和避障功能就必須要感知導引線和障礙物,感知導引線相當給機器人一個視覺功能。自動尋跡是基于自動導引小車(AGV—auto-guided vehicle)系統,實現小車自動識別路線,判斷并自動規避障礙,選擇正確的行進路線。采用與地面顏色有較大差別的線條作引導,使用傳感器感知導引線和障礙判斷。
傳感器選擇:
實現機器人的視覺和接近覺功能有多種方式:
1)可使用CCD攝像頭進行圖象采集和識別方法,但是不適用在小體積系統使用,并且還涉及圖象采集、圖象識別等領域。
2)電容式接近傳感器,基于檢測對象表面靠近傳感元件時的電容變化。
3)超聲波傳感器,根據波從發射到接收的傳播過程中所受到的影響來檢測物體的接近程度。
4)紅外反射式光電傳感器,它包括一個可以發射紅外光的固態發光二極管和一個用作接收器的固態光敏二極管(或光敏三極管)。
根據使用場合的具體情況,傳感器要感知的對象是物體的有無和物體的接近程度,與精確的測距系統有相似之處,但又有不同,只要求判斷出簡單的閾值或提供遠、近分檔的距離。因此使用較簡單的接近傳感器實現小車尋跡和避障是有依據可循的并且是可行的。為了簡單起見,系統中使用了八個紅外反射式光電傳感器,其中三個用于尋跡,三個用于障礙判斷,兩個用于主動輪測速。
紅外反射式光電傳感器特性與工作原理:
反射式光電傳感器的光源有多種,常用的有紅外發光二極管,普通發光二極管,以及激光二極管,前兩種光源容易受到外界光源的干擾,而激光二極管發出的光的頻率較集中,傳感器只接收很窄的頻率范圍信號,不容易被干擾但價格較貴。理論上光電傳感器只要位于被測區域反射表面可受到光源照射同時又能被接收管接收到的范圍就能進行檢測,然而這是一種理想的結果。因為光的反射受到多種因素的影響,如反射表面的形狀、顏色、光潔度,日光、日光燈照射等不確定因素。如果直接用發射和接收管進行測量將因為干擾產生錯誤信號,采用對反射光強進行測量的方法可以提高系統的可靠性和準確性。紅外反射光強法的測量原理是將發射信號經調制后送紅外管發射,光敏管接收調制的紅外信號,原理如下圖所示:
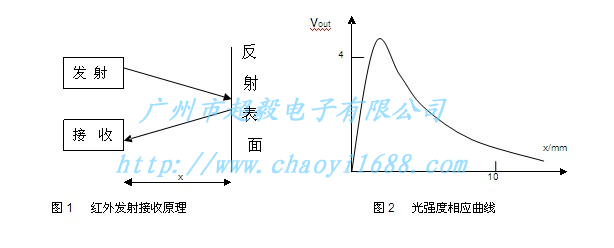
反射光強度的輸出信號電壓Vout 是反射面與傳感器之間距離x的函數,設反射面物質為同種物質時,x與Vout 的響應曲線是非線性的,如圖2所示。設定輸出電壓達到某一閾值時作為目標,不同的目標距離閾值電壓是不同的。
具體設計與實現:
接近覺傳感器應用場合不同選擇不同,感覺的距離范圍不同,可從幾毫米到幾米。對于自動尋跡和小車輪子的測速傳感器,反射距離都在1cm左右,探測環境都在陰影之下,不易受到日光的干擾。因此,這兩種探測的傳感器都選用FS-359F反射紅外傳感器,048W型封裝。該封裝形狀規則,便于安裝。對于障礙物的檢測,可以使用超聲波傳感器,效果也較好,但電路系統龐大,還需占用大量MCU時間。上文的激光傳感器雖然性能不錯,但價格較貴。從需要5—10cm垂直探測距離的要求來看,普通的紅外反射式傳感器又很難勝任。在對6個型號的傳感器測試后,選用了價格、性能基本適合的043W封裝的反射紅外傳感器。在使用約40mA的發射電流,沒有強烈日光干擾(在有日光燈的房間里)探測距離能達8cm,完全能滿足探測距離要求。紅外傳感器的電路有多種形式,在這里為了安裝調試方便,我們采用了下圖的電路形式。紅外線光電傳感器的電路。.png)
傳感器的使用數量應該盡量少以減少單片機的信號處理量,尋跡小車一共安裝有八個紅外光電傳感器,選用運算放大器LM324,光電傳感器檢測到的信號經放大器放大整形送微處理器判斷、運算、控制。LM324是14腳DIP封裝,內置四個運算放大器的集成器件,用兩個LM324便能完成所有傳感器與MCU的連接,并且電路簡單,響應速度快,波形規則,調試簡單。
尋跡用接近傳感器安裝位置下圖所示,A、C傳感器騎在黑線兩測用于檢測是否跑偏,B傳感器在黑線范圍內用于輔助檢測,以確保小車機器人隨時在以下圖的狀態運行。傳感器狀態決定下一步的運行方式,具體可參見程序設計中的相關內容。
.png)
測障礙傳感器安裝位置分別位于小車前、左、右三個方向,用于檢測前方、左邊和右邊的障礙。測速度傳感器安裝在緊靠車輪兩側。
系統控制由微處理器完成,微處理器采用ATMEL公司的單片機AT89C2051,AT89C2051是一個只有20引腳的芯片,其相對AT89C51減少了兩個對外端口P0和P2,適合于對端口數量要求不高的小型系統。由內部引腳可知P1.0和P1.1都沒有內部上拉電阻,在需要對外輸出電流時要外接上拉電阻,這點在設計時應該特別引起注意。各I/O口的最大吸收電流為25mA,能直接驅動LED。軟件能與AT89C51系列兼容。綜上所述,AT89C2051能夠達到我們期望的功能和性能要求,圖5給出了它的典型連接方式。其中VCC的電壓范圍為2.3V-6V,保證電源在較寬的范圍使用。C1、R1、R2、S2構成上電/手動復位電路。
自主式尋跡、避障智能小車的硬件設
計包括了傳感器測量電路、控制處理器電路、電機驅動電路、顯示處理器電路,以及電源、顯示部分。系統中采用了電機的專用驅動芯片L298N驅動直流電機,電機速度采用PWM方式進行脈寬調制控制。程序設計主要考慮穩定性、抗干擾性,主程序主要起到導向和決策功能,決定什么時候機器人該做什么。各種功能的實現通過調用具體的子程序,包括:尋跡、90°轉向、直線前進、顯示、延時、定時等。由于篇幅限制這里不再敘述。

紅外反射式傳感器在自主式尋跡、避障機器人上的應用說明,用光電傳感器作為機器人的近距離感覺傳感器是可行的,當距離小于10mm時,有較好的可靠性和抗干擾能力,而傳感器的探頭尺寸僅為幾個毫米,特別適合小型化,在相應的智能控制系統中可進行有意義的嘗試。光電傳感器的顯著特點是非接觸、不受電的干擾、靈敏度高、時間分辨率和空間分辨率高,可進行全方位的測試。當然,單一傳感器獲得的信息非常有限,由于傳感器受到自身性能的影響也帶有不確定性。隨著傳感器種類的增多,一個強大的智能系統應該是一個多傳感器系統,也是信息感知的新的研究方向。如果需要咨詢更多的紅外線光電傳感器的資訊請聯系官網客服:http://072129.cn

關于“”的相關資訊
| 我要評論: | |
|---|---|
| 內 容: | |
| 驗證碼: | (內容最多500個漢字,1000個字符) 看不清?! |
請注意: |
|
|
1.尊重網上道德,遵守中華人民共和國的各項有關法律法規,不發表攻擊性言論。 2.承擔一切因您的行為而直接或間接導致的民事或刑事法律責任。 3.新聞留言板管理人員有權保留或刪除其管轄留言中的任意內容。 |

共有-條評論【我要評論】